Introduction
La régulation industrielle occupe une place importante dans le monde moderne, en raison des performances de plus en plus élevées que l’on réclame des commandes automatiques.
La régulation permet de maintenir une grandeur physique à une valeur constante quelques soient les perturbations extérieures. L'objectif global de la régulation peut se résumer par ces trois mots clefs : Mesurer, Comparer et Corriger.
Dans cette partie on va introduire brièvement les généralités qui traitent l’étude d’une régulation industrielle.
Exemple de Régulation manuelle du niveau
La figure suivante représente un exemple de régulation manuelle.
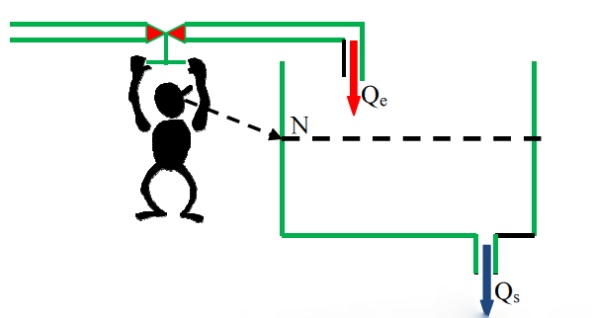
Cet exemple est très simple pour comprendre le principe de la régulation. La figure ci-dessus représente un homme qui veut contrôler le niveau d’un réservoir à partir d’une vanne manuelle, dont à chaque instant, ses yeux "mesurent" l'écart qui existe entre le niveau actuel et le niveau désiré (N). Son cerveau commande alors aux mains d'agir sur la vanne, en sorte que cet écart diminue, puis s'annule. L’homme dans la figure ci-dessus réalise les fonctions suivantes: mesure, transmission de l’information, réflexion et réglage.
Afin d’obtenir le fonctionnement désiré, la régulation doit agir en continu sur le système. Pour cela il faut observer la grandeur à contrôler (observation), comparer cette grandeur à celle désirée et déterminer l’action à entreprendre (réflexion) puis agir sur une ou plusieurs grandeurs entrées du système (actions). On obtient alors une chaîne de régulation (ou bien une boucle de régulation)
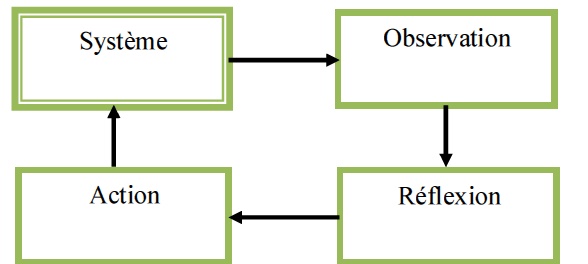
Pour automatiser cette boucle, il faut remplacer chaque maillon humain par un appareil. Il faut également faire communiquer ces appareils les uns avec les autres.Les yeux jouent alors le rôle d'organes de mesure (ou de capteurs), le cerveau celui de comparateur et les mains celui d'organe de puissance.
|
Régulation : La régulation regroupe l'ensemble des techniques utilisées visant à contrôler une grandeur physique soumise à des perturbations. Cette grandeur physique est alors appelée "grandeur réglée". Exemples de grandeur physique : pression, température, débit, niveau etc.… Cette grandeur donne son nom à la régulation. Exemples : Régulation de pression, Régulation de température, Régulation de débit, Régulation de température, Régulation de débit, Régulation de niveau etc.…
|
Toute une régulation comportera trois grandes fonctions nécessaires à sa bonne marche comme indique la figure suivante:
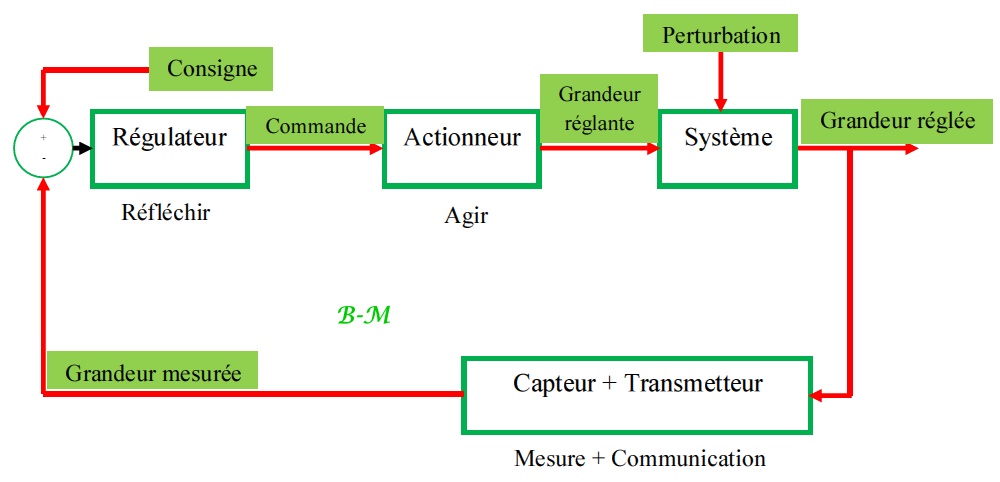
Pour réguler un système physique, il faut :
Mesurer la grandeur réglée avec un capteur.
Réfléchir sur l'attitude à suivre : c'est la fonction du régulateur. Le régulateur compare la grandeur réglée avec la consigne et élabore le signal de commande.
Agir sur la grandeur réglante par l'intermédiaire d'un organe de réglage.
2. Organes constitutifs d’une boucle de régulation:
La régulation d’une grandeur physique y(t) élaborée par un système industriel (t représente le temps) consiste à essayer d'obtenir :=W(t)")
où W(t) représente la loi de consigne .
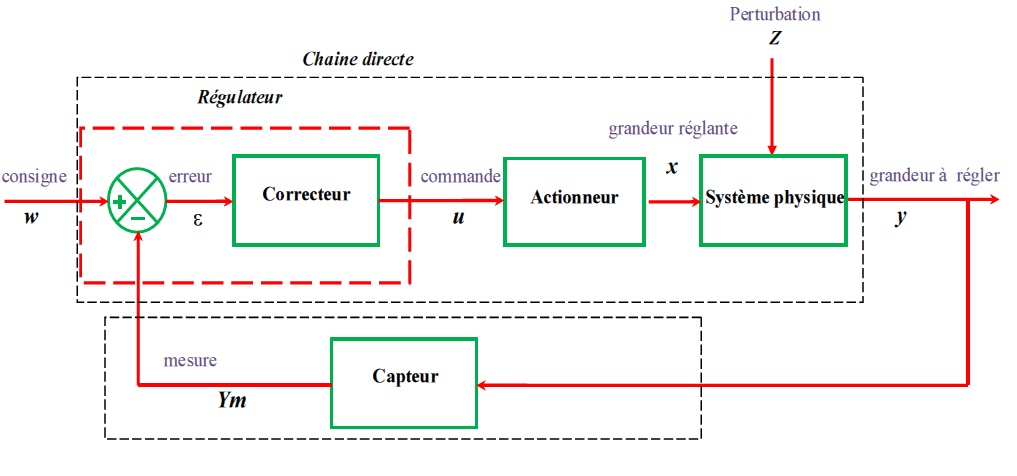
Dans toutes les boucles de régulation, on retrouve les éléments (organes) suivants:
- le système physique à commander et soumis à des perturbations, c’est un dispositif isolé soumis à des lois bien définies. Chaque système a plusieurs entrées et sorties par lesquelles on peut exercer une influence sur ce système.
- un capteur ;
- un Transmetteur
- une consigne (fixe ou variable dans le temps) ;
- un comparateur délivrant un signal d’écart (erreur) ; compare en permanence la consigne et la grandeur réglée et donne le résultat de cette comparaison au régulateur.
- un régulateur.
- un organe de réglage et actionneur.
- un Indicateur.
- un Enregistreur.
Dans toutes les boucles de régulation, on retrouve les signaux (grandeurs physiques) suivants :
- La grandeur réglée (y)
:
C'est la grandeur physique que l'on désire contrôler. Elle donne son nom à la régulation, par exemple : régulation de température, niveau, débit,… etc.
La consigne (W) :
C'est la valeur désirée que doit avoir la grandeur réglée, généralement c’est qui a été choisie pour contrôler la grandeur réglée.
Les grandeurs perturbatrices (Z):
Sont les grandeurs physiques susceptibles non mesurables (non contrôlables) d'évoluer au cours du processus et d'influencer la grandeur réglée.
La grandeur réglante (x) : c'est la grandeur qui va agir sur le processus et influencer la grandeur à régler (ex : radiateur) pour permettre de modifier la température fans une salle.
L’erreur ε), c’est le signal généré par le comparateur.
Signal de Commande (u):
La mesure du Capteur (ym):
3. Distinction asservissement/ régulation
Il est bien de faire la distinction entre boucle d’asservissement et boucle de régulation. Toutes les deux fonctionnent sur le même principe, mais leur finalité diffère sensiblement:
Un asservissement impose à la grandeur de sortie (grandeur à régler) du système de suivre rapidement les variations de la consigne avec une certaine précision (la grandeur de sortie est identique ou proportionnelle à une grandeur d’entrée) (ex : la position de l'antenne d’un radar de poursuite de satellites doit suivre la consigne imposée par la position du satellite chaque instant ; poursuite de trajectoire → consigne variable).
|
Un système asservi est un système dit suiveur, c’est la consigne qui varie. Exemple : une machine outil qui doit usiner une pièce selon un profil donné, un missile qui poursuit une cible, pilotage automatique d’un avion, radar de poursuite de satellites. |
Une régulation impose à la grandeur de sortie d’atteindre une valeur de consigne et d’y rester quelles que soient les perturbations éventuelles (ex : régulation de pression, de température ↔ consigne fixe : la température dans un logement doit être constante quelles que soient les conditions extérieures).
|
Dans une régulation, la consigne est fixée et le système doit compenser l’effet des perturbations, Exemple : le réglage de la température dans un four, de la pression dans un réacteur, le niveau d’eau dans un réservoir. |
 3.1. Exemples :
3.1. Exemples :
- Exemple 01 :
On prend comme exemple un conducteur de voiture qui veut maintenir l'accélérateur réglé pour deux positions 60km/h et 100km/h.
Notion de perturbations extérieures (régulation) :
La voiture roule sur le plat à une vitesse constante 60km/h, une pente se présente et entraîne un ralentissement du véhicule qui reprend sa vitesse initiale dès que la voiture roule de nouveau sur le plat.

Suivant le type de voiture (puissance), le ralentissement provoqué par la montée ne sera pas le même. Ceci introduit la notion de caractéristique du système.
Notion de changement de la consigne (asservissement) :
La voiture roule sur le plat à 60km/h, lorsque le conducteur veut rouler à 100km/h, donc il doit passer à la seconde position de l’accélérateur.

- Exemple 2 : Asservissement de température.
On souhaite que la température dans un four pour traitement thermique, à partir de la température ambiante, monte lentement de 10°C par minute jusque 200°C, puis reste constante pendant 10 minutes, puis monte rapidement de 20°C par minute jusque 540°C, reste alors constante pendant 15 minutes, avant de redescendre de 10°C par minute jusque 250°C...
Cette fonction du temps ainsi décrite est la loi de consigne W(t). C’est l'utilisateur de l'asservissement qui choisit la loi de consigne un signal en fonction du temps. L'automaticien doit réaliser l'asservissement pour qu'il fonctionne pour toute loi de consigne dans des limites (en valeurs extrêmes et en vitesse maximale de variation) définies dans le cahier des charges.
- Exemple 3 : Régulation de température.
Un cas particulier consiste à définir une loi de consigne constante. Dans ce cas le mot asservir devient réguler, et l'asservissement devient une Régulation.
La régulation est un cas particulier de l'asservissement. La de régulation consiste donc à maintenir une grandeur physique y(t) élaborée par un processus technologique (t représente le temps) à une valeur constante.