Organes constitutifs d’une boucle de régulation:
1. Système physique (Procédé Industriel)
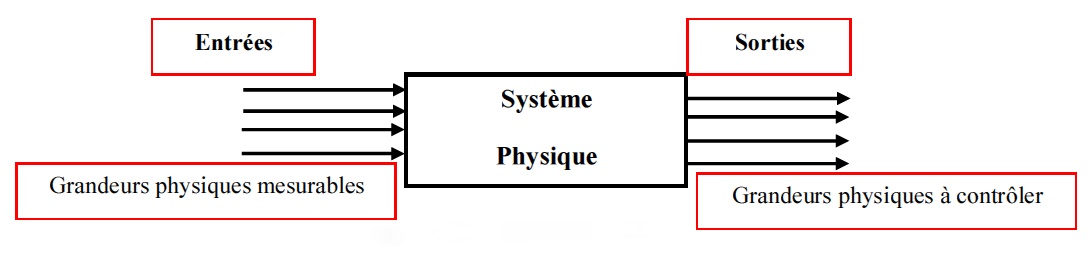
Un système physique est un terme général qui désigne un ensemble d’appareils destiné à obtenir un produit bien déterminé. L’évolution d’un système dépend de plusieurs grandeurs incidentes (entrées). Le système est caractérisé à l’aide d’une ou plusieurs grandeurs physiques mesurables à maîtriser (contrôlables) qui vont permettre de contrôler l’objectif fixé (sorties) comme indique la figure suivante :
1.1. Exemple de Système : Mélangeur de lait et de chocolat :
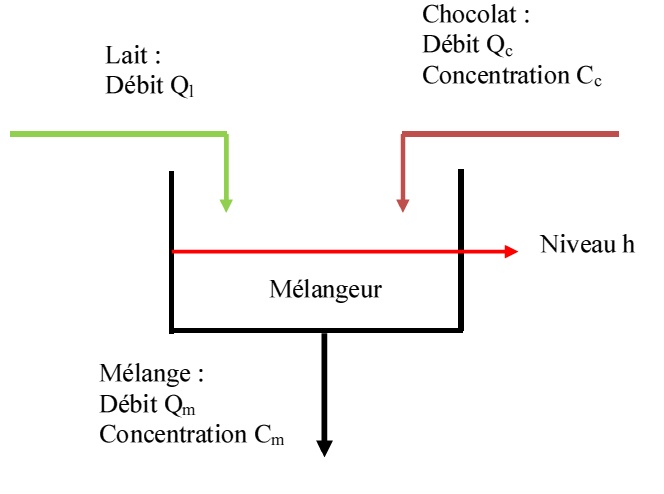
Afin de fabriquer industriellement du lait chocolaté, on mélange du chocolat à du lait. On souhaite contrôler la qualité du mélange obtenu à partir d’une analyse donnant la concentration en chocolat. Le niveau permet de connaître le volume dans le mélangeur.
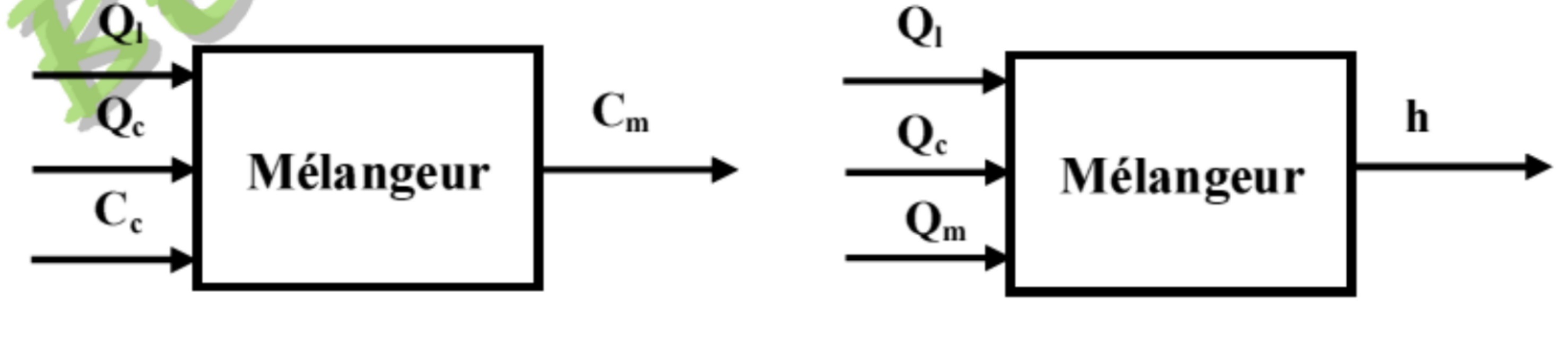
Le système (mélangeur) est représenté par le schéma de la figure ci-dessus, tels que les grandeurs à maîtriser (grandeurs à contrôler ou bien les sorties) sont : le niveau h et la concentration du mélange Cc . Dans ce système le débit de lait Ql, le débit de chocolat Qc et le débit du mélange Qm vont agir sur le niveau h ; et les grandeurs d’influence sur la concentration du mélange Cc sont le débit de lait Ql, le débit de chocolat Qc et la concentration en chocolat Cc. La figure suivante: indique les grandeurs qui modifient l’état du système en entrées et les grandeurs qui caractérisent le système en sorties.
1.2. Exemple 2 : Four
Le système (four) est représenté par le schéma suivant :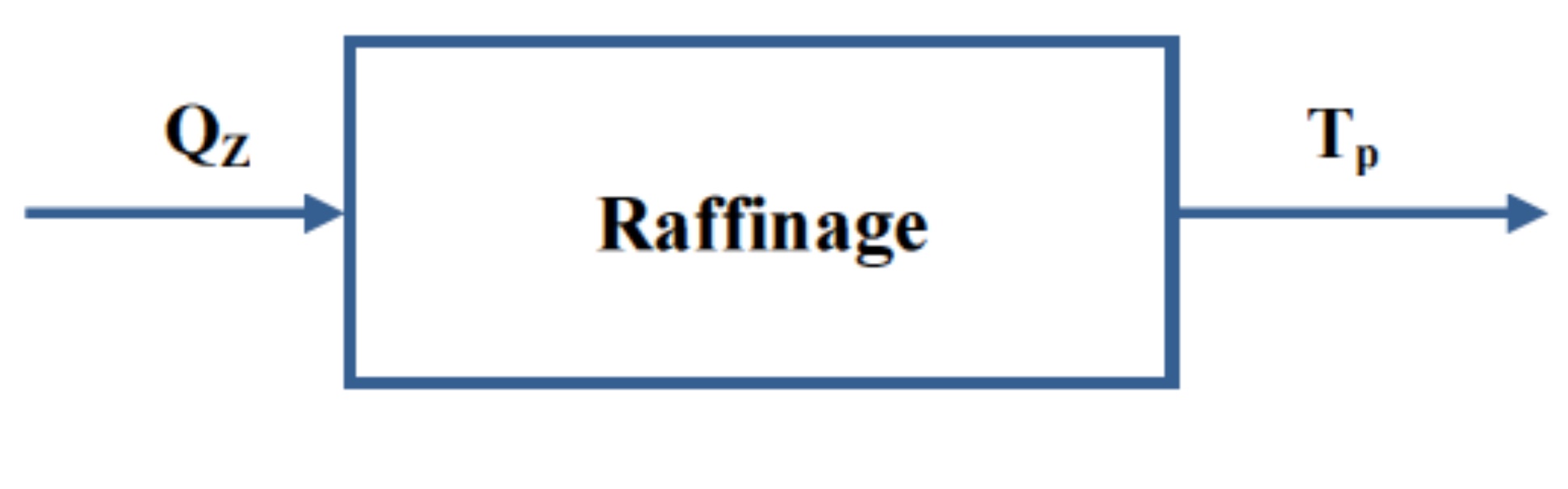
Remarque:
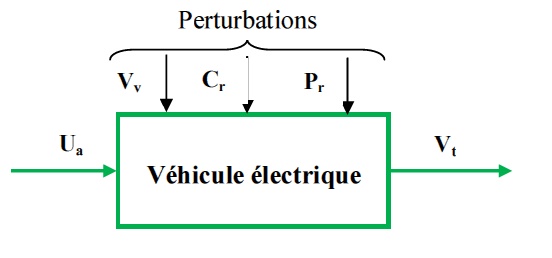
Généralement des sorties des systèmes ne dépendent pas seulement des grandeurs mesurables mais sont aussi sensibles à d'autres grandeurs qui varient de façon imprévisible et qu'on appelle perturbations. Comme exemple, la variation de la vitesse Vt d'une voiture électrique est effectuée par la variation de la tension d'induit Ua (grandeur mesurable) des moteurs. Mais la vitesse du véhicule est aussi sensible à la vitesse frontale du vent Vv (et à son sens), à la pente de la route Pr, à la charge Cr, etc... Qui sont des grandeurs non mesurables, ce système peut être représenté par le schéma suivant:
Un autre exemple de système de chauffage de la température au centre d'une salle par des radiateurs de chauffage central. Pour agir sur la température on fait varier le débit d'eau dans les radiateurs par l'intermédiaire d'une petite vanne. Mais la température dans le local est aussi sensible à la température de l'eau qui circule, à la température extérieure, à l'ouverture d'une porte ou d'une fenêtre, au nombre de personnes qui entrent, etc...
1.3. Notion Fonction de transfert (transmittance, Schémas blocs)
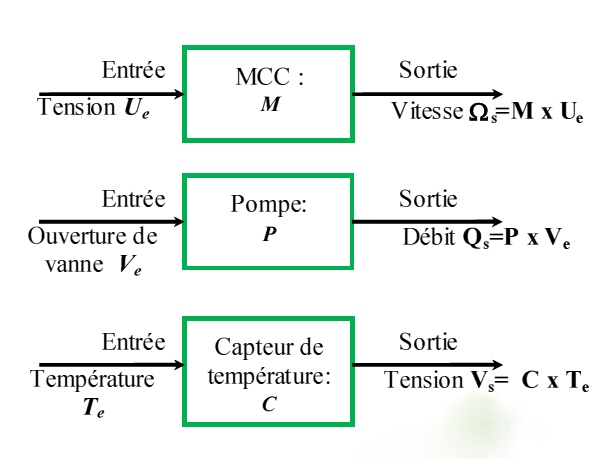
Chaque système peut être représenté par un schéma bloc liant une grandeur d’entrée et une grandeur de sortie.
La transmittance est le coefficient (ou fonction) par lequel on applique l’entrée pour connaitre la sortie.
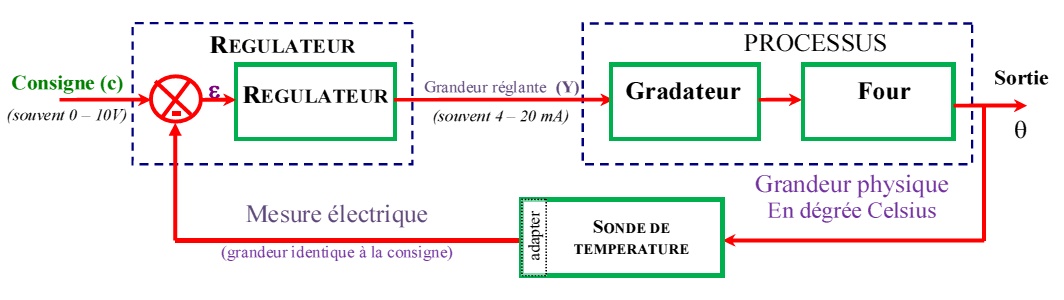
2. Régulateurs
Les régulateurs (contrôleurs, correcteurs) sont le centre d’une régulation industrielle. Ils reçoivent la mesure des grandeurs à régler, les comparent au point de consigne enregistré dans le régulateur et envoient un retour en tant que sortie du régulateurs pour contrôler le dernier élément de régulation (organe de réglage). Il existe des systèmes pneumatiques et électroniques ou programmables numérique. Un régulateur numérique utilise un algorithme mathématique complexe pour effectuer l’action de contrôle.
Un régulateur : sert à générer une loi de commande qui calcule le signal à envoyer sur l’actionneur de l’organe de réglage.
- Un régulateur peut être analogique il est réalisé avec des composants analogiques (essentiellement des amplificateurs opérationnels) et son signal de sortie évolue de manière continue dans le temps.
- Le régulateur peut également être numérique : il est réalisé à l’aide d’un système programmable (microprocesseur par exemple) et son signal sortie est alors le résultat d’un algorithme de calcul.
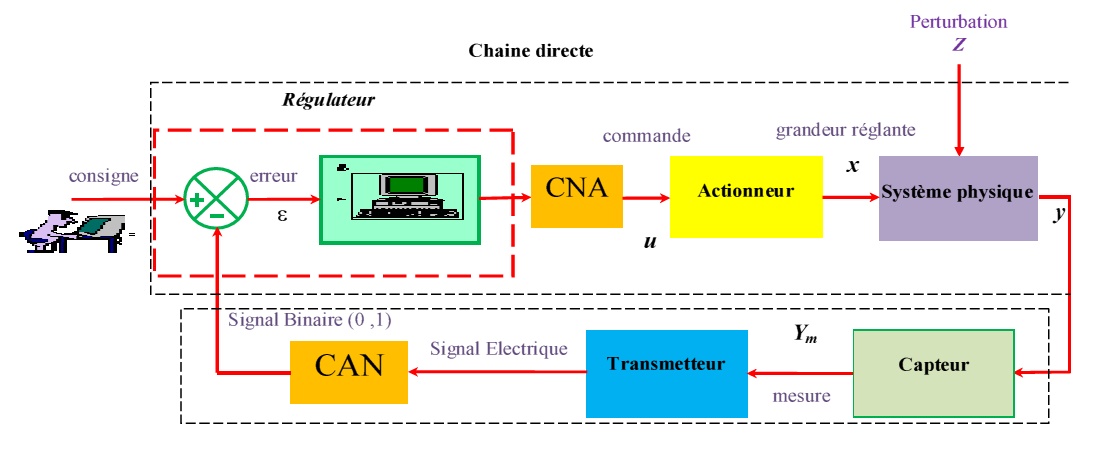
- CNA : convertisseur Numérique Analogique
- CAN : convertisseur Analogique Numérique
On trouve également les régulateurs T.O.R. (Tout ou Rien). La grandeur réglante ne peut prendre que deux valeurs et l’actionneur de puissance ne dispose alors que de deux états de fonctionnement il est « ouvert » ou « fermé ». Le suivi de consigne est dans ces conditions beaucoup moins fin qu’avec les deux systèmes précédents, mais il peut être suffisant si l’on ne désire pas une grande précision (par exemple le thermostat qui met en route ou arrête le chauffage dans un appartement).
3. Actionneur : (Elément qui agit sur la grandeur réglante).
Un actionneur est la partie la plus importante de l'élément de régulation finale, un dispositif qui provoque un changement physique dans l'élément de contrôle final (organe de réglage). Pour une vanne de contrôle, l’actionneur est la tige de la vanne et pour un dispositif de chauffage, il s’agit du serpentin de chauffage. Un actionneur peut être contrôlé en pneumatique, hydrauliquement, électriquement.
Les actionneurs pneumatiques utilisent la pression d'air de l'instrument pour appliquer une force sur la membrane afin de déplacer l'actionneur de la vanne, puis pour positionner la tige de la vanne.
La photo suivante montre une vanne de régulation, avec un actionneur pneumatique à membrane monté au-dessus du corps de la vanne.
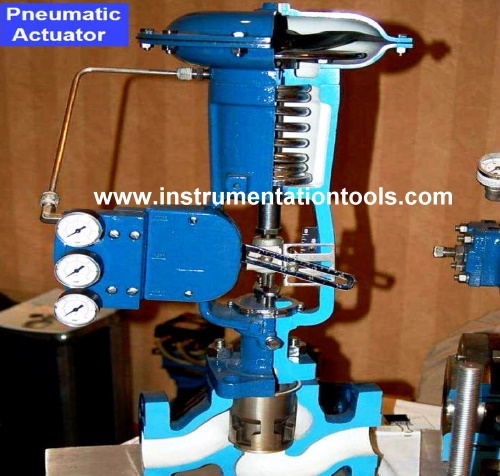
Dans cet exemple (Figure ci-dessus), le grand ressort hélicoïdal fournissant un positionnement par défaut de la vanne (la pression d’air agissant contre le diaphragme, déplace la vanne contre le ressort. La pression d’air appliquée au bas de la membrane soulève la tige coulissante de la vanne vers le haut.
La pression atmosphérique nécessaire pour motiver un actionneur pneumatique peut provenir directement de la sortie d'un régulateur pneumatique ou d'un transducteur (ou convertisseur) de signal traduisant un signal électrique en un signal de pression atmosphérique.
De tels transducteurs sont généralement appelés convertisseurs I / P ou "I à P", car ils traduisent généralement un signal de courant électrique (I) de 4 à 20 mA CC en un signal de pression d'air (P) de 0.2 à 1 bar.
Certains actionneurs de vannes pneumatiques sont équipés de volants utilisés pour positionner manuellement la vanne en cas d’absence de la pression d'air. La photo suivante montre une vanne de régulation à tige coulissante avec actionneur pneumatique à membrane et "volant"

4. Indicateurs:
Un indicateur est un périphérique lisible par l'homme qui affiche les variables d’un processus industriel. Il existe des indicateurs analogiques tels que ceux utilisés dans le capteur de pression et de température et des indicateurs numériques qui affichent les grandeurs à régler sous forme de chiffres. Même si la grandeur à régler est connectée au régulateur, les indicateurs sont utilisés par les industries à des fins différentes.

5. Les capteurs:
Un capteur est un instrument qui fournit une sortie utilisable en réponse au mesurande d’entrée. Un capteur est également appelé élément de détection, capteur primaire ou détecteur primaire. Le mesurande est la grandeur physique à mesurer.
Un transducteur d'entrée produit une sortie électrique représentative du mesurande d'entrée. Sa sortie est conditionnée et prête à être utilisée par l’électronique de réception, telle que PLC ou DCS.
L'électronique de réception peut être un indicateur, un régulateur, un ordinateur, un automate programmable, un système de contrôle-commande, etc. Le terme «transmetteur», tel qu'il est couramment utilisé avec les instruments de régulation, a une définition plus étroite que celle d'un capteur ou d'un transducteur:
5.1. Le capteur-transmetteur : Le capteur-transmetteur est constitué de 2 parties principales:
- Le corps d’épreuve qui se trouve en contact avec la grandeur physique à mesurer.
- Le transmetteur est chargé de mettre en forme normalisée le signal ym et transporte l’information. Ce transmetteur est aussi appelé conditionneur.
5.2. Le corps d’épreuve :
- Exemples :
La sonde qui se trouve plongée dans le milieu dont on mesure la température et dont la résistance varie quand la température varie.
La membrane qui détecte une variation de pression par rapport à une pression de référence (vide ou atmosphère).
5.3. Le transmetteur ou conditionneur : C’est lui qui traite la mesure recueillie par le corps d’épreuve de façon à en tirer la valeur de la grandeur physique que l’on mesure.
- Exemples :
Pour la mesure de température, le transmetteur mesure la résistance de la sonde et lui affecte la température correspondante puis transforme cette valeur en pourcentage et enfin génère le signal de transmission.
Pour la mesure de pression, le transmetteur relève la déformation de la membrane, lui associe la pression correspondante...
5.4. Choix du capteur-transmetteur :
Il existe 2 types de capteur-transmetteurs, les capteur-transmetteurs dits "actifs" et les capteur-transmetteurs dits "passifs".
Les capteur-transmetteurs actifs sont alimentés en 220 V et produisent le signal d’information (par exemple une intensité dans la gamme 4-20 mA).
Les capteur-transmetteurs passifs ne sont pas alimentés en 220 V. dans ce cas, il faut ajouter un générateur.
Le choix du corps d’preuve est effectué en fonction du procédé. Pour le choix du transmetteur, il est effectué en fonction de la nature du signal d’information transmis.
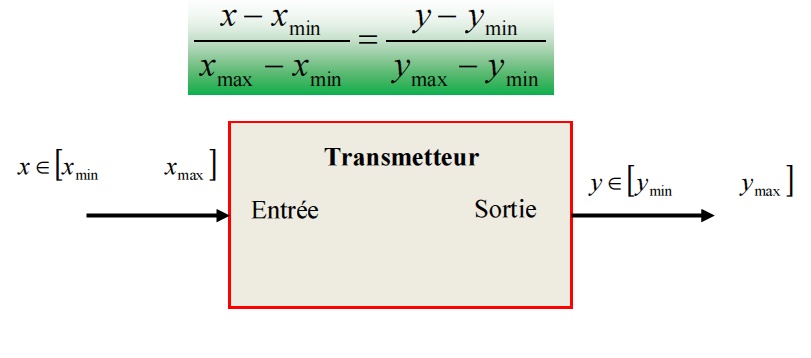
Chaque instrument a au moins une entrée et au moins une sortie. Pour les instruments à réponse linéaire, la correspondance entre entrée et sortie est proportionnelle :
Exemple :
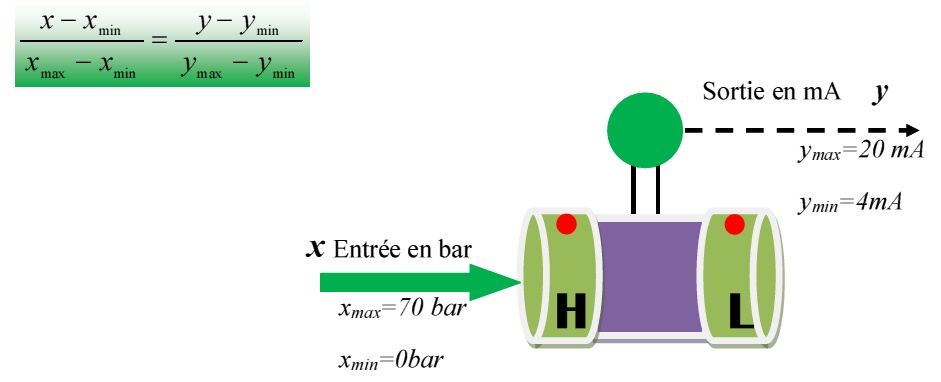
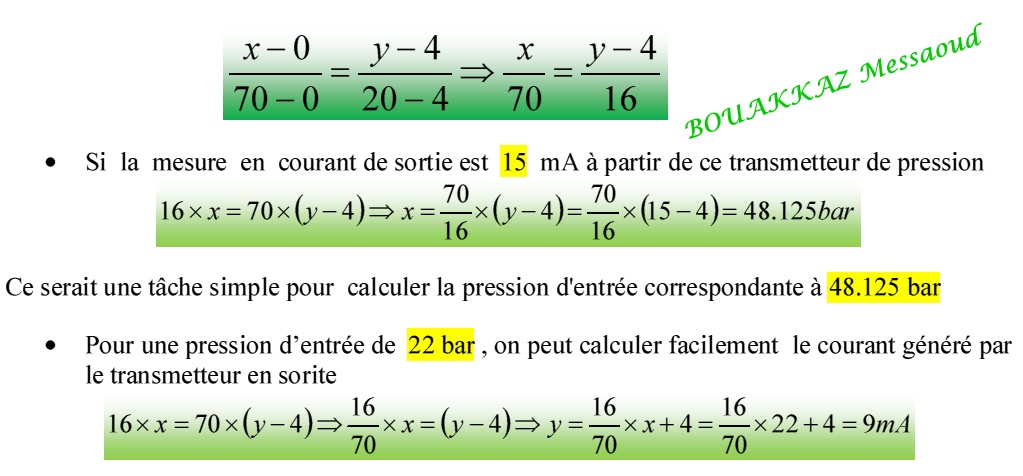
Un exemple pratique en est un transmetteur de pression, dans ce cas, avec une plage d’entrée de 0 à 70 bar et une sortie de 4-20 mA.
|
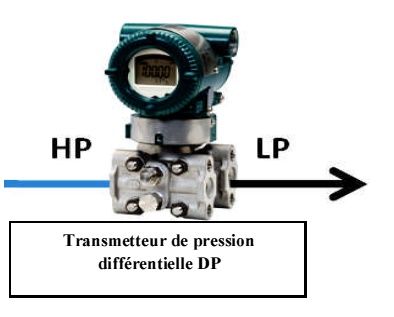
Un transmetteur de pression différentielle (ou cellule DP) mesure littéralement toute pression différentielle sur ports de mesure de pression haute et basse et fournit une sortie proportionnelle à la différence de pression entre les ports de pression haute et basse. |
Exemple thermocouples+ transmetteur www.Instrumentationtools.com |
|---|---|
 |
 |
5. Les signaux de communication- câblage entre différents organes :
5.1. Nature des signaux transmis :
Généralement l’information se transmet en utilisant un support physique facilement contrôlable. Il sera soit électrique soit pneumatique (pressions d’air dans des tubes).
- Signal électrique - Intensité électrique : Les signaux de communication sont en général un courant continu variant de 4 à 20 mA. Suivant le type de capteur utilisé, deux cas peuvent être trouvés : Un capteur passif nécessite d’utiliser un générateur externe et Un capteur actif c’est lui qui est un générateur.
Le signal électrique, contenant l’information sur y, est émis par le capteur-transmetteur sous forme d’une intensité électrique, le courant transite par le régulateur et retourne au capteur puisque la boucle de courant est fermée. Le régulateur mesure ce courant lors de son passage et connaît ainsi l’information véhiculée.
- Signal électrique - Tension électrique :
L’information avec ce type de signal est transmise de la même façon que pour le 4-20 mA mais avec maintenant une tension normalisée qui varie de 0 à 10 V ou 0 à 5 V.
- Signal pneumatique –Pression :
L’information avec ce type de signal est transmise de la même façon que pour le 4-20 mA mais avec un signal transmis dans ce cas est une pression qui varie entre 0,2 et 1 bar.
Exemple:
Soit le procédé donné par la figure suivante:
6. Exemples de systèmes de régulation :
Exemple 01 : 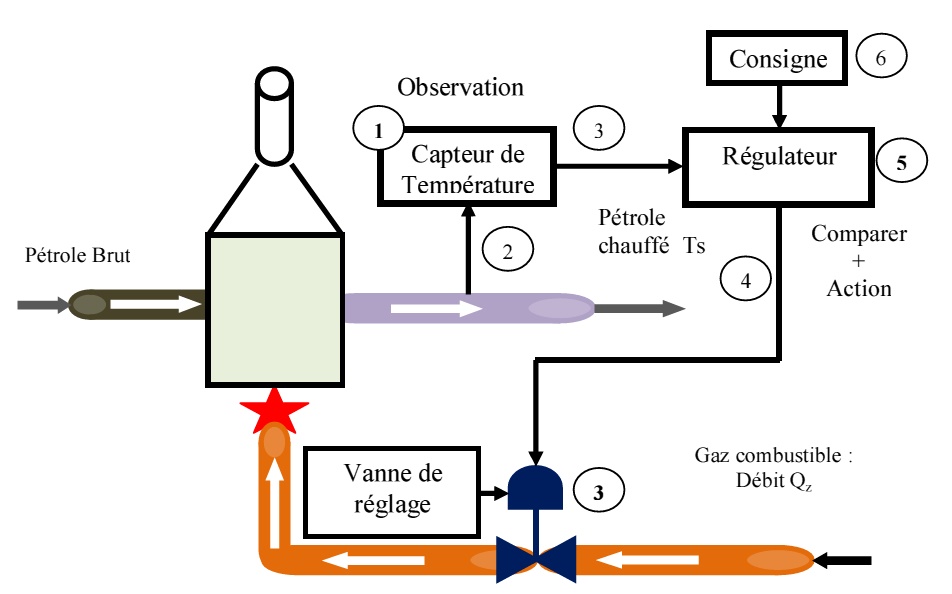
(1) Capteur : contrôle la grandeur réglée (2) et en rend compte au régulateur. Il doit en donner une image fidèle. Sa sensibilité impose les limites de la précision de la régulation.
(3) Actionneur (organe de réglage): il maîtrise la puissance à fournir au processus à partir du signal issu du régulateur (4).
(5) Régulateur : il élabore un signal de commande à partir de l’écart (erreur) entre l’entrée (consigne) (6) et la mesure (3) et permet d’améliorer les performances du système.
- Remarque :
Avant de pouvoir réguler y(t), il faut pouvoir agir sur y(t) par modification d'une grandeur de commande x(t). Par exemple dans le cas du four, en supposant que c'est un four à gaz, on pourra agir sur la température en faisant varier le débit de gaz dans les injecteurs par l'intermédiaire d'une petite vanne proportionnelle motorisée.
Exemple 02 :
Soit la figure suivante qui représente la régulation de vitesse.
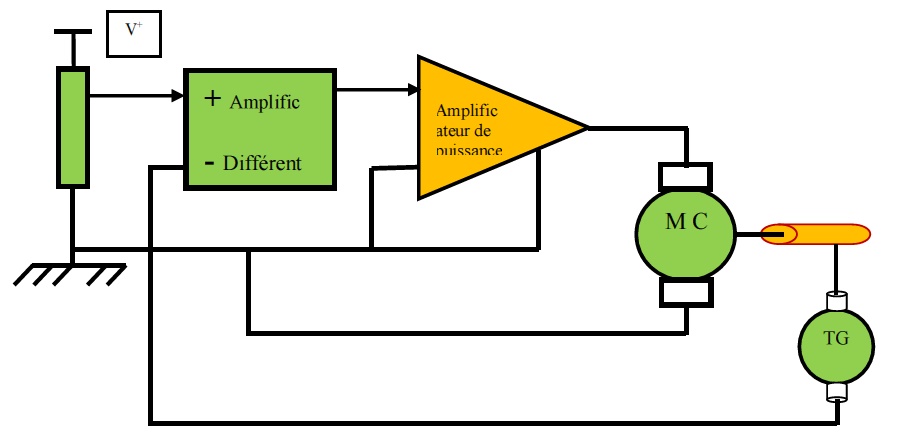
Que l'on veuille maintenir constante la vitesse (V) d'une voiture. A la valeur (V) de la vitesse correspond une valeur (e) de la course de l'accélérateur. Il suffirait donc, en principe, de maintenir (e) constant pour que (V) le soit. Chacun sait que la réalité est différente. En effet, le vent, les variations de pente et le mauvais état de la route modifient (V). Ces paramètres extérieurs qui influent sur la vitesse sont appelés grandeurs perturbatrices ou perturbations. Si elles n'existaient pas, la boucle de régulation serait inutile.