Aperçu des sections
- Généralités
- Section 1
Section 1
TD/TP N°I Démarrage (Y-Δ) d’un moteur asynchrone Pr.Benouaret
I- Description du problème
Il existe de nombreux moteurs et convoyeurs utilisés dans les industries à des fins différentes. Dans certains cas, les moteurs ou les convoyeurs nécessitent un démarrage progressif faisant intervenir le diagramme baptisé " Star-delta" afin d'éviter la présence des anomalies qui pourraient endommager la machine lors d'une opération de contrôle pour un certain systèmes. Par exemple, dans le pont roulant, chaque fois que les opérateurs tentent de le déplacer pour la manutention des matériaux, ils seront tenus de respecter cette restriction pour garantir le bon fonctionnement de ce système. Nous pouvons donc utiliser des systèmes automatisés pour piloter le moteur dans environnement adéquat.
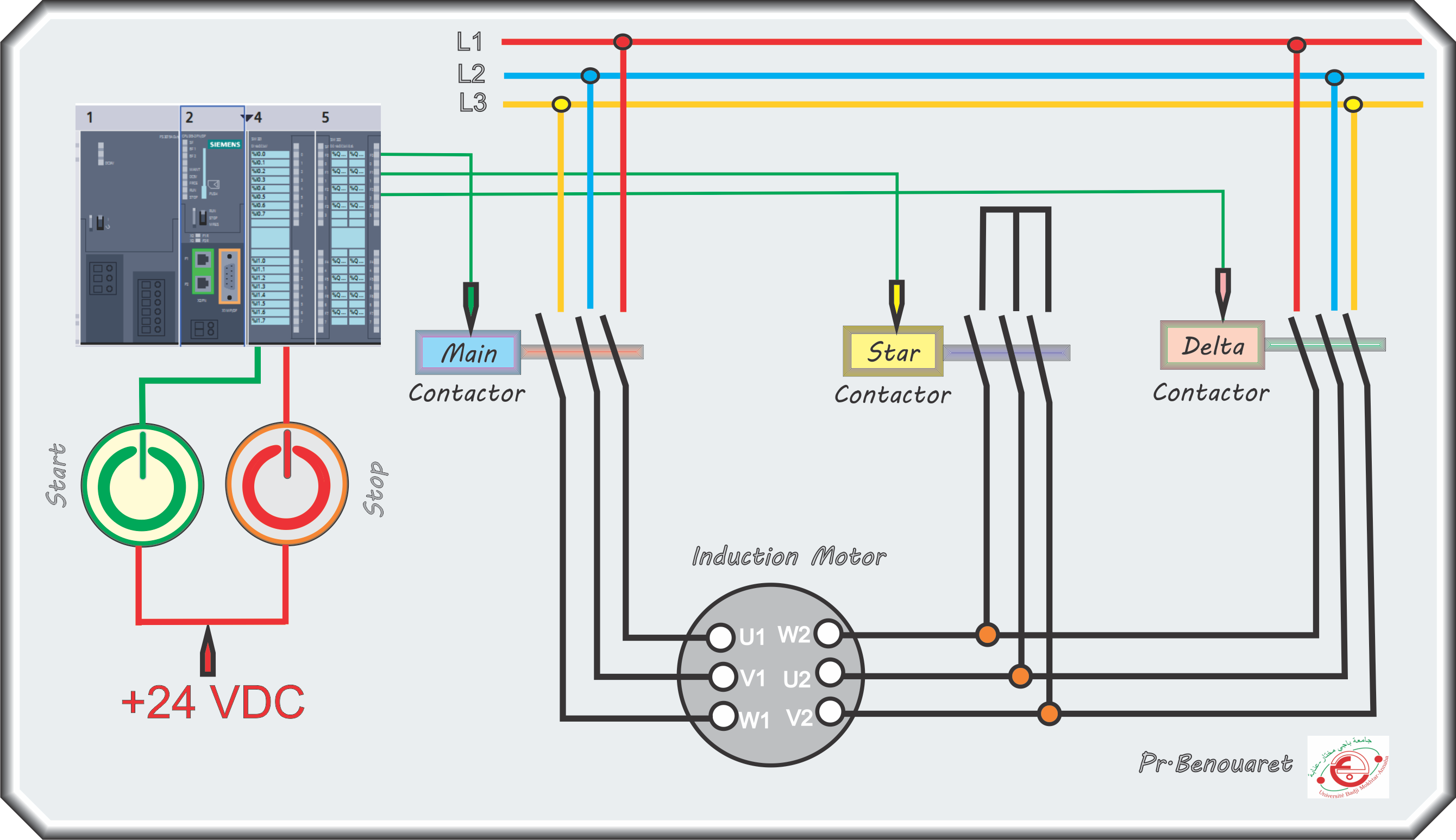
II- Diagramme fonctionnel
Le schéma ci-dessous illustre de façon explicite les différents organes qui peuvent constituer notre application qui requiert entre autres :
1- Une station minimale caractérisée par l'alimentation, la CPU et les modules d'entrées/sorties digitales (DIO)
2- Trois contacteur dont leurs bobines sont de type +24 VDC pour commander le moteur mis en jeux.
3- un moteur à induction triphasé qui fait l'objet de notre application.
4- Deux boutons poussoirs, le bouton "Start" qui mettra le système en service et le deuxième bouton "Stop" pour provoquer l'arrêt immédiate du système et peut également servir d'un bouton "Reset" globale de la tâche planifiée.
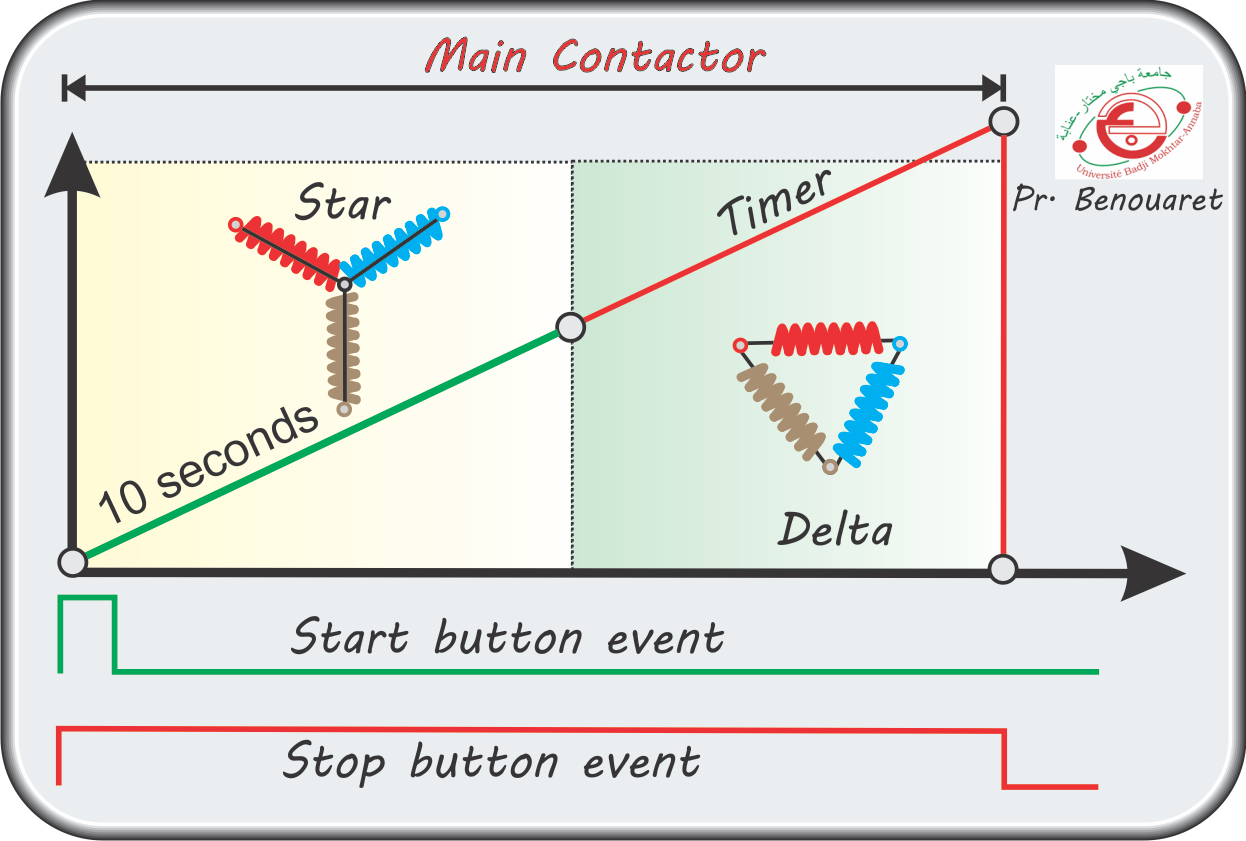
III- Dimensionnement du problème
Dans ce cas, Il faudrait démarrer le moteur en étoile "Star" pendant une durée de 10 secondes pendant laquelle le moteur nécessite un courant de démarrage à l'ordre de 1/3 du courant nominale ce qui lui octroie une vitesse de rotation modérée, ensuite le moteur tourne à sa vitesse nominale lorsque le contacteur "delta" est excité après avoir réalisé le verrouillage soft pour éviter toute sorte de risque lors du basculement entre les deux configurations. Ici, nous résolvons ce problème tout en ayant recours à une logique de contrôle structurée en moyennant des composants prédéfinis tels que les bascules et les temporisations pour mieux cerner cette problématique. Nous utiliserons trois contacteurs pour la commande du moteur car nous avons besoin de deux types de démarrage selon la configuration adoptée pour cette manipulation. Ainsi le contacteur principal " Main Contactor" doit être mis en amont du moteur pour assurer son alimentation triphasée et le deuxième contacteur " Star Contactor" ayant pour mission de remplir les conditions de démarrage modéré en étoile pour atteindre certaine vitesse au bout de quelques secondes. Quant au troisième contacteur qui a pour but de ramener le moteur en pleine vitesse. Nous devrions également envisager deux ✌ boutons-poussoirs, c'est-à-dire pour la mise en service via le bouton "Start" et le bouton " Stop" est dédié spécialement pour l'arrêt du moteur. Il ne faut pas oublier que pour des raisons pratiques, nous devons choisir un bouton "Stop" normalement fermé.
IV- Diagramme temporel
V- Implémentation & validation du programme
1
En premier lieu, essayez de donner le programme correspondant en utilisant le langage familier "Ladder"
2
Utilisez la notion de "maître-esclave" pour modéliser ce système via le "Grafcet" et faites la confrontation entre les deux approches (Ladder & grafcet)
3
Enfin, essayez de faire l’implémentation complète en moyennant la programmation structurée à base des "FB & DB" et par conséquent, créer l'interface de la supervision HMI pour valider le programme final.
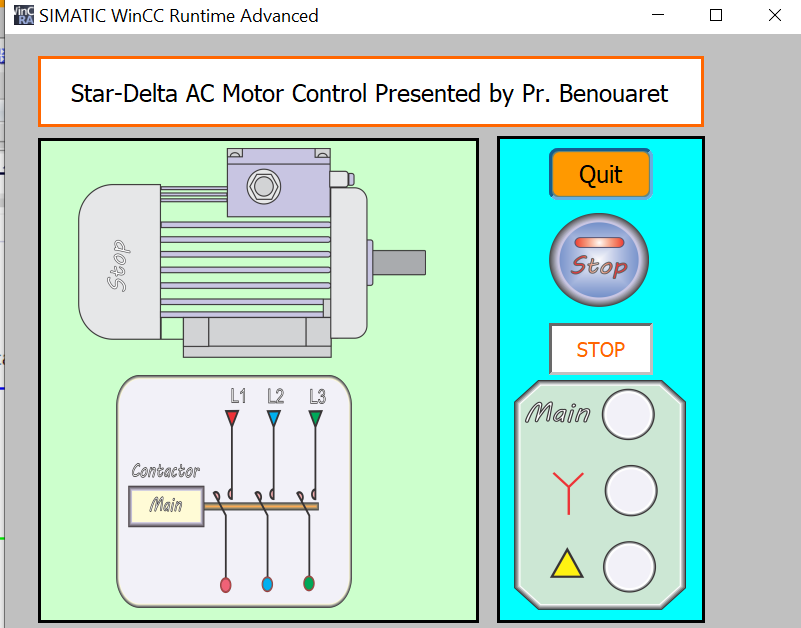
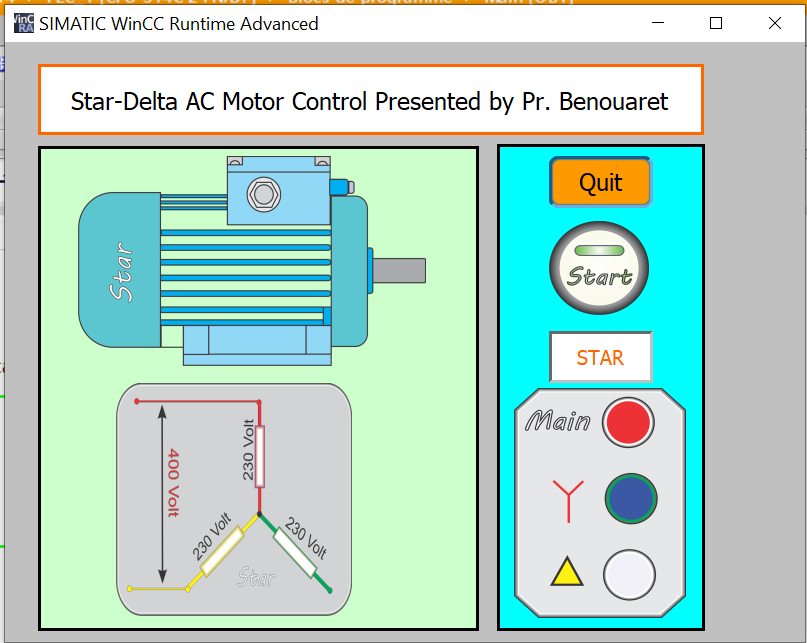
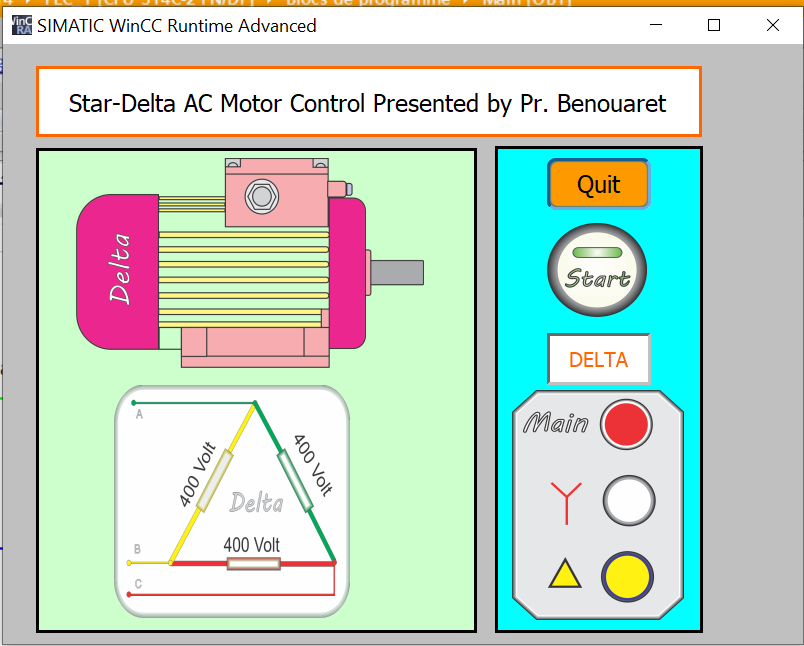
I- VI- Simulation & Supervision
L'implémentation finale du programme devrait conduire à l’interface HMI qui peut se comporter comme le montrent les trois figures suivantes :
Good luck and remember that action speaks better than words !!!
- Section 2
Section 2
I- Introduction
Le secteur industriel ne cesse d'impliquer des mécanismes automatisés du transport portant sur les chariots ou bien les wagonnets pour accélérer, d'une part, le processus de production et d'autre part d’assurer la sécurité des opérateurs techniques ainsi que pour faciliter la maintenance du système et de permettre la mise en place d'une stratégie de contrôle, en temps réel, plus élaborée afin de garantir une fiabilité de fonctionnement dans un environnement robuste et de pérenniser la production. Dans ce contexte, nous nous intéressons au contrôle et à la supervision "HMI" du mouvement aller-retour du chariot qui transporte les matériaux entre deux stations différentes.
II- Problématique
Un wagonnet se déplace de la position "St1" à partir d’une action sur un bouton poussoir "Right", vers la station "St2", puis il revient à la position initiale "St1" sous l'effet de l'action produite lorsque le bouton poussoir "Left" est enfoncé. Le cycle ne peut être redémarré que si le wagonnet est complètement à la position initiale et que le bouton "Right" est de nouveau pressé. Il faut noter que le bouton poussoir "Stop" est responsable de l'arrêt du wagonnet, à tout moment en cas de besoin, pour une éventuelle intervention de maintenance.

L'itinéraire délimité par les deux balises "St1" et "St2" fait 100 mètres de longueur et le wagonnet lui-même, est doté d'un dispositif permettant de "compter/décompter" la distance parcourue lors de déplacement du système à une vitesse de 1m/s. Il convient de se rappeler que, à l'état initial, le compteur doit être remis à zéro afin qu'il puisse refaire le cycle.
III- Vulgarisation & simplification de l'architecture
Pour bien appréhender la problématique ciblée, il faut songer à donner une vision holistique pouvant contribuer découpler les différentes tâches portant tant sur le volet programmation que sur le volet de la supervision. Pour ce faire, il incombe à l’étudiant de faire le croquet global décrivant le fonctionnement du système à étudier qui devrait être scindé en deux parties principales en l’occurrence :
1- Le bloc fonctionnel qui renferme le programme de contrôle ? selon le langage adopté pour cette application.
2- Une machine à trois états pour gérer la partie commande en provenance de l'interface HMI comme s'aperçoit explicitement dans le tableau ci-dessous.
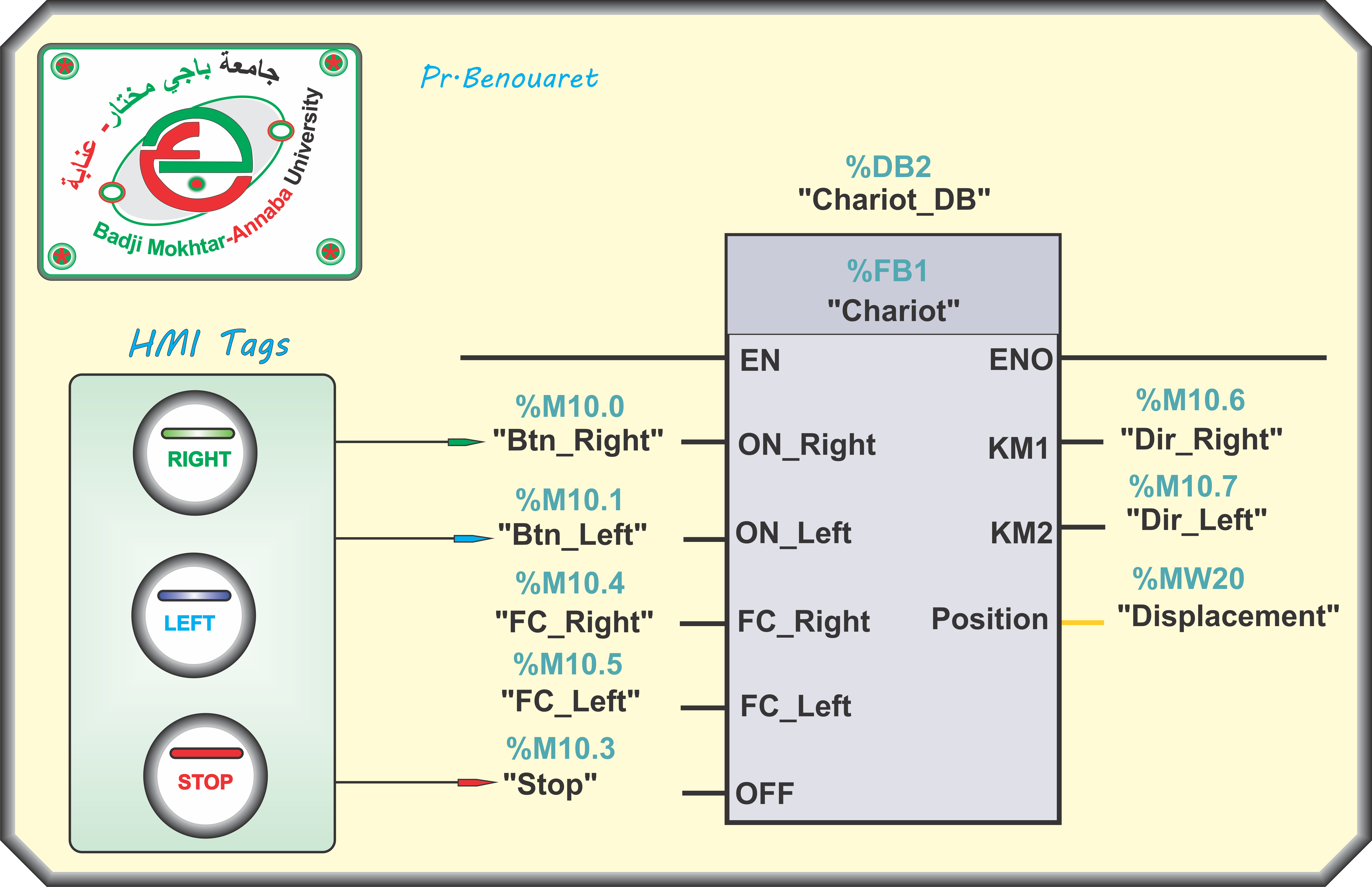
On se propose donc de représenter, selon un point de vue système, le comportement dynamique des objets en s’appuyant sur leurs propriétés telles que les « events » et la « visibility » pour réaliser la partie attendue de la commande.
State/Event
STOP
RIGHT
LEFT
STOP
0
1
0
RIGHT
0
0
1
LEFT
1
0
0
VI- Travail à réaliser
1-
Avant de se lancer dans la phase d’implémentation il est commode de proposer une modélisation du problème consolidée par une analyse fonctionnelle explicite.
2-
Donnez deux aspects de programmation, le premier s’articule autour du langage « Ladder » et le deuxième s’appuie sur le langage « Grafect » et faites une confrontation entre les deux approches.
3-
Créez une interface « HMI » pour répondre à notre cahier de charge.
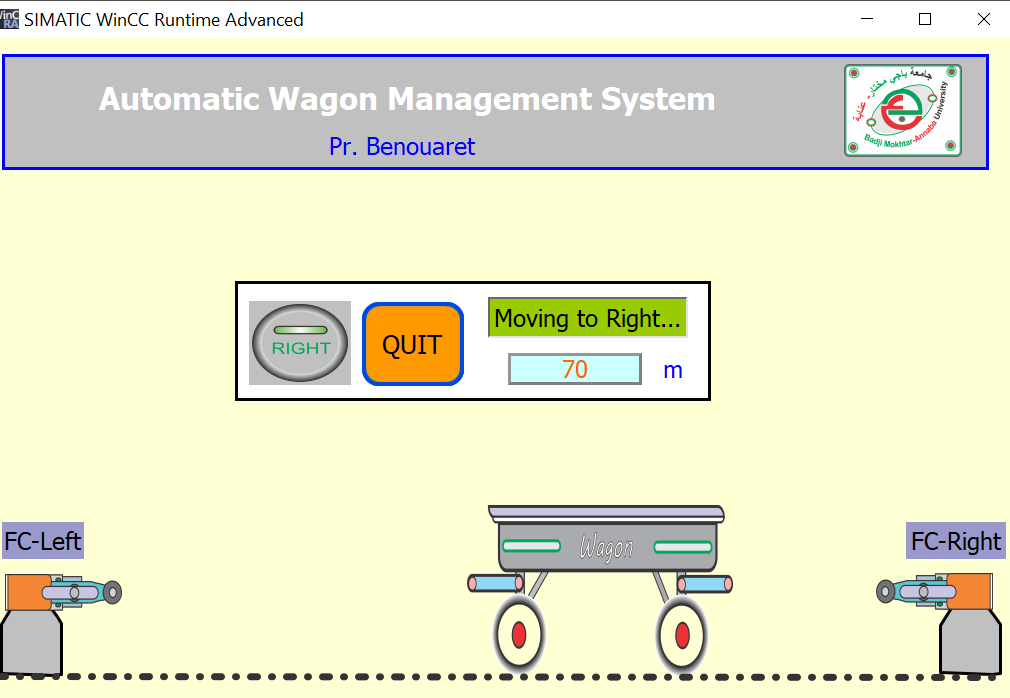
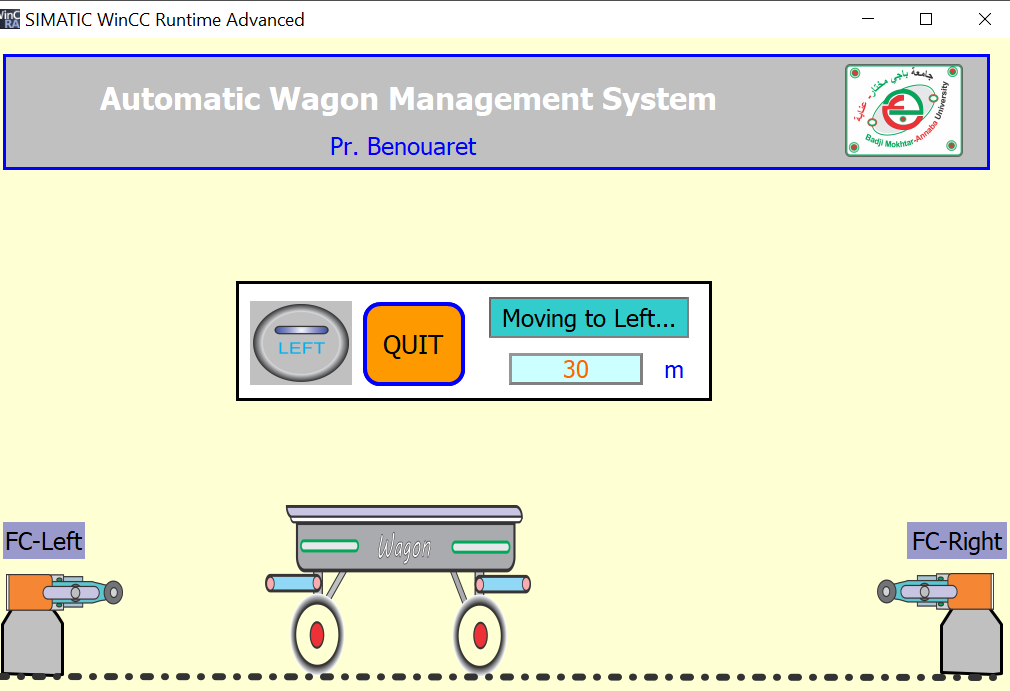
VI- Simulation & Validation du programme
Après avoir effectué convenablement la configuration matérielle et avoir créé le composant de l’interface « HMI », voici comment devrait se comporter la réalisation finale dont l’étudiant sera censé la confectionner conformément à ce modèle de conception.
- Section 3
Section 3
- Section 4
Section 4
- Section 5
Section 5
- Section 6
Section 6
- Section 7
Section 7
- Section 8
Section 8
- Section 9
Section 9
- Section 10
Section 10